
Ein interdisziplinäres Studierendenteam der Hochschule für Technik FHNW hat sich einer besonderen Aufgabe gestellt: In zwei Semestern entwickelten sie einen Mars-Rover, der über unwegsames Gelände navigieren, wissenschaftliche Experimente durchführen und technische Wartungsaufgaben ausführen kann. Im September 2022 messen sie sich mit 16 anderen Finalisten-Teams in Polen an der European Rover Challenge.

Die Europäische Rover Challenge ist ein internationaler Weltraum-Robotik-Wettbewerb. Studierendenteams von überall auf der Erde entwickeln einen voll funktionsfähigen Marsroboter nach ihrem eigenen Design, der auf einem künstlich angelegten Marsgelände bestimmte Aufgaben erledigen muss.
Ein interdisziplinäres Team aus Studierenden der Hochschule für Technik FHNW beschloss, sich der Herausforderung anzunehmen: Joel Becker, Daniel Richner und Fabian Gärtner vom Studiengang Elektro- und Informationstechnik sowie Yannik Ahrens, Jan Mazacek, Nadine Richard und Constantin Ruetsch vom Studiengang Maschinenbau.
Etwas später stiessen die beiden Informatik-Studenten Sandro Covo und Jeffrey Smith zum Projekt. «Mich reizte die Aufgabe, einmal Software zu entwickeln, die nicht nur auf einem Server läuft, sondern etwas physisches steuert», erklärt Sandro Covo seine Motivation, bei der Entwicklung des Rovers mitzuarbeiten.
Unterstützt wurde das Team von drei Coaches: Von Seiten Elektro- und Informationstechnik von Prof. Dr. Pascal Schleuniger, Dozent für Analogtechnik und Elektromagnetische Verträglichkeit; für Problemstellungen im Bereich Maschinenbau von Matthias Günthart, Dozent für Produktentwicklung; und in Sachen Informatik von Prof. Dr. Christoph Stamm, Dozent für Informatik und Forschungsleiter am Institut für Mobile und Verteilte Systeme FHNW.
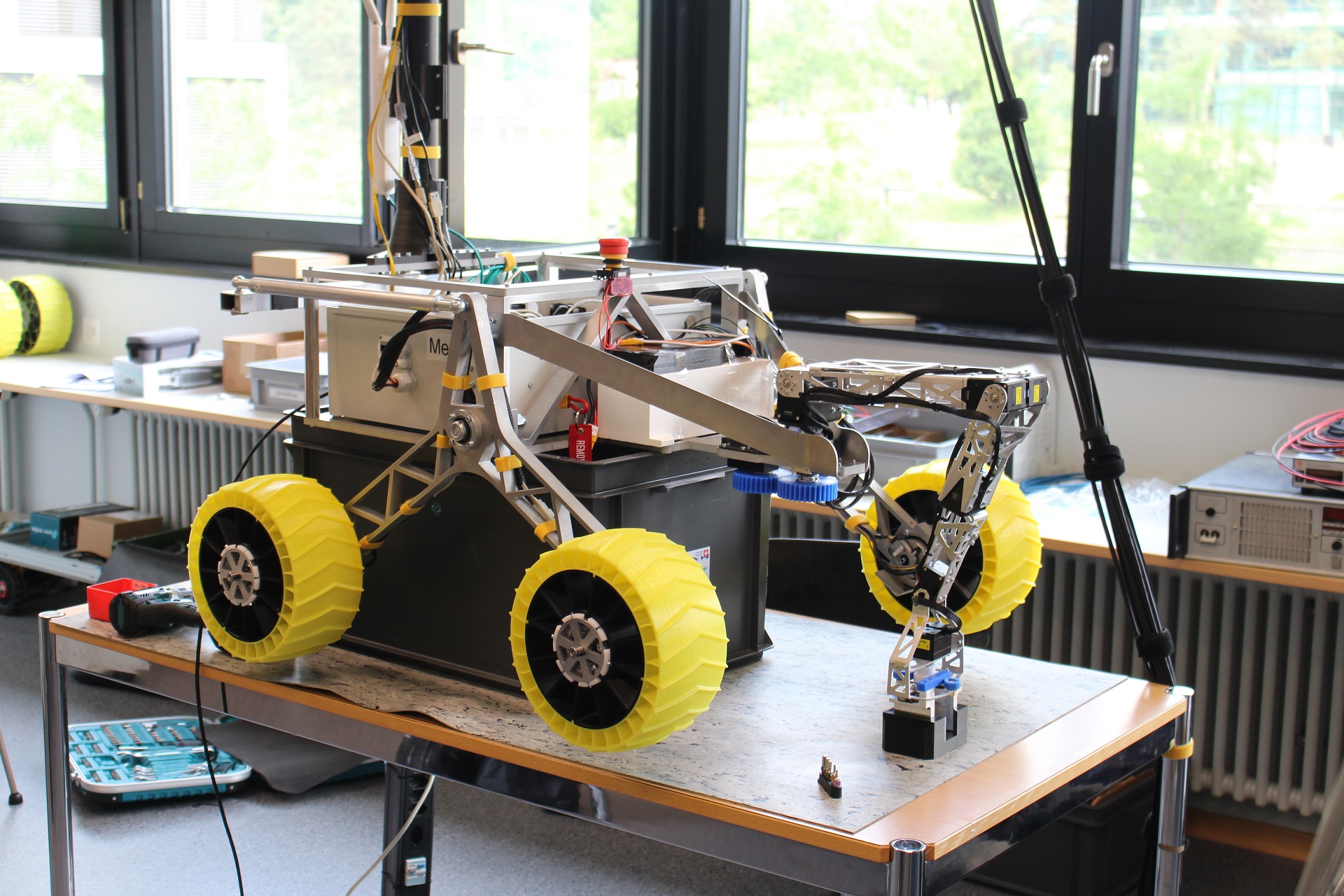
In einem Jahr entwickelte das Team aus der Vision ihren lauffähigen Rover, «Meyer 1». Namenspate ist der kürzlich in den Ruhestand getretene Leiter der Ausbildung der Hochschule für Technik, Prof. Dr. Martin Meyer. «Er hat junge Studierende und Ingenieurinnen und Ingenieure während Jahrzehnten inspiriert», erklärt Projektleiter Joel Becker die Namenswahl.
Über Hügel und Steine
Die Entwicklung des Rovers war nicht ohne Herausforderungen. Insbesondere die Fortbewegung über unebenes Gelände benötigt ausgeklügelte Lösungen. Um sicherzustellen, dass die vier Räder des Rovers auch bei der Fahrt über Unebenheiten ständig Bodenkontakt halten können, setzt das Team auf eine sogenannte Rocker-Aufhängung. Das Prinzip kommt in ähnlicher Form auch bei den Mars-Rovern der NASA zu Einsatz und erlaubt es dem Roboter, auch grössere Hindernisse zu überwinden.
Die in knalligem Gelb leuchtenden Räder stammen aus dem privaten 3D-Drucker von Fabian Gärtner. Der äusserste Teil besteht aus einem flexiblen Kunststoff, um kleinere Unebenheiten auszugleichen, gekoppelt mit einer Felge aus hochfestem Kunststoff. Dann folgt das Gleitlager aus POM und Aluminium, gefertigt in der hauseigenen Werkstatt der FHNW HAT. Darin befinden sich auch die 180 Watt starken Motoren und Getriebe des Sponsors Maxon, sowie die Encoder.
Sammeln, stecken und drücken
Der Rover muss sich nicht nur über unebenes Gelände bewegen können, sondern auch Aufgaben erledigen, die auf dem Mars anfallen könnten: etwa Proben sammeln, Stecker in ein Panel einstecken oder Knöpfe drücken. Dafür entwickelten die Maschinenbau-Studierenden Nadine Richard und Jan Mazacek einen Manipulator – im Wesentlichen ein Roboterarm, der sich um verschiedene Achsen bewegen und mit einem multifunktionellen Werkzeug verschiedene Tasks ausführen kann. Die Leichtbau-Rahmenstruktur des Manipulators besteht aus wasserstrahlgeschnittenem Aluminium. So gelang es den beiden Studierenden, den rund 70 cm langen Arm unter drei Kilogramm Gewicht zu halten. Ausgerüstet ist der Manipulator mit intelligenten Servomotoren des Teamsponsoren Robotis.
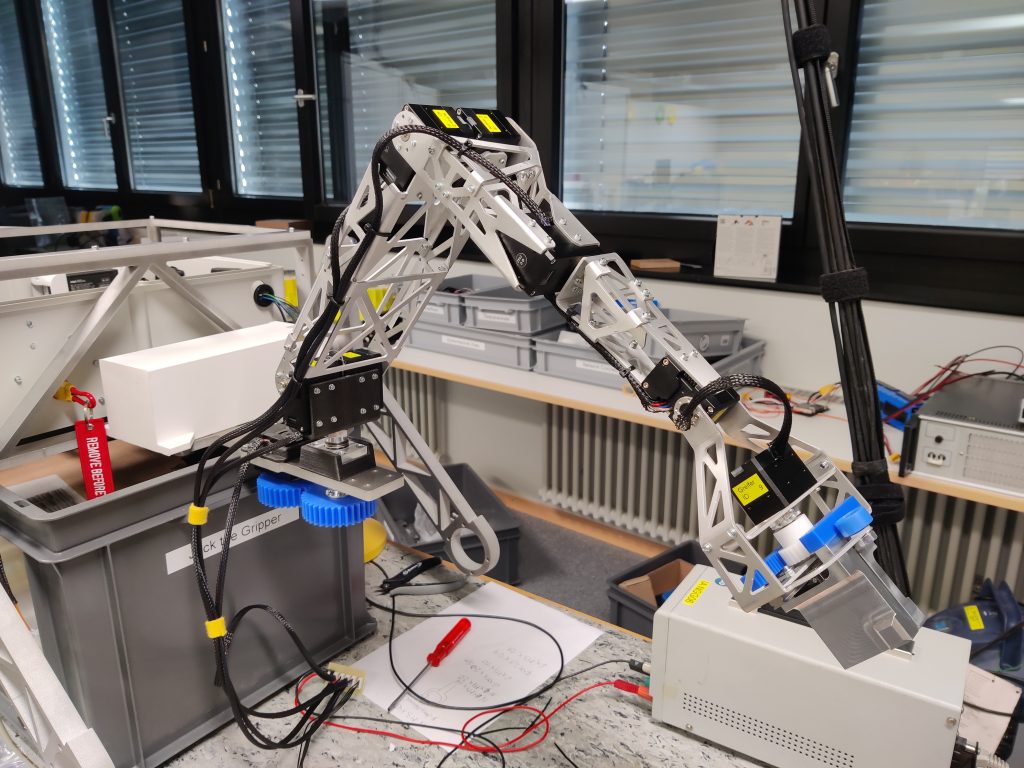
Um die Steuerung zu perfektionieren, nutzte das Team das Prinzip des «Digitalen Zwillings» – ein virtuelles Modell des Arms. Eine Software nutzt die Eingaben eines Playstation-4-Controllers, um sie in Bewegungen für die verschiedenen Achsen umzuwandeln. Diese Bewegungen werden dann dem simulierten Modell und dem echten Roboterarm gleichzeitig hinzugefügt. «Durch die intelligenten Servomotoren weiss die Software immer, wo genau sich eine Achse befindet, wie viel Strom sie verbraucht und ob der Arm die gewünschte Position erreichen konnte», erklärt Daniel Richner das Prinzip.
Für die Orientierung und die Kommunikation ist der Rover mit einem Antennenmast ausgestattet, auf der mehrere Kameras für die Rundumsicht, eine 2.4 GHz und eine 5 GHz-Antenne und eine Anzeigelampe montiert sind.
Den Horizont öffnen – und Hindernisse überwinden
Die Arbeit am Rover war intensiv – und auch nicht immer einfach. Das Team musste mit Rückschlägen umgehen: etwa Komponenten, die falsch produziert wurden, Konzepte, die in Realität nicht so funktionierten wie geplant, oder gar einem Designfehler, wegen dem bei einem Motortest Elektronikteile in Rauch aufgingen. «Solche Momente sind natürlich etwas frustrierend – aber wir haben daraus gelernt und beim nächsten Versuch haben wir es besser gemacht», sagt Joel Becker.




Trotz gewisser Schwierigkeiten, die positiven Erfahrungen überwiegen: «Mir gefällt es, ein Produkt von Anfang bis zum Schluss selbst zu entwickeln, umzusetzen und fortlaufend zu verbessern», so Maschinenbau-Studentin Nadine Richard. Auch die Zusammenarbeit mit Studierenden aus verschiedenen Studiengängen hat dem Team Spass gemacht: «Es ist interessant, die verschiedenen Arbeitsweisen anderer Studiengänge zu sehen, und wie diese zusammenfliessen», sagt Fabian Gärtner, der sich auf die Leistungselektronik fokussiert hat.
«Es ist herausfordernd, ein Projekt mit so viel verschiedenen Arbeitsweisen und Interessen zu planen und auf Kurs zu halten, die Resultate sind dafür aber umso spektakulärer» so das Fazit von Joel Becker.
FHNW Rover-Team qualifiziert sich für Finalrunde
Die Arbeit hat sich gelohnt: Von über 90 teilnehmenden Teams hat sich der FHNW-Rover als einer der 16 Finalisten für den Wettbewerb in Polen qualifiziert. Und nicht nur das – in der Qualifikation hat das Team von 80 möglichen Punkten 76.5 Punkte ergattert und damit den zweiten Platz der Vorrunde geholt.

Im nächsten Studienjahr soll das Projekt weitergehen, mit einer neuen Gruppe von Studierenden. Interessierte Studierende aus den Studiengängen Elektro- und Informationstechnik, Systemtechnik, Maschinenbau und Informatik, die im Herbstsemester ins dritte oder fünfte Semester starten, sind eingeladen, die nächste Version des Marsrovers zu entwickeln.
FHNW-Rover-Blog
Das Mars-Rover-Teams der FHNW betreibt einen Blog, in dem es weitere technische Details und Geschichten aus dem Projektalltag zum Nachlesen gibt:
https://www.fhnw.ch/plattformen/erc-rover/blog/
1 Comments
Man munkelt, dass Herr Mazacek nicht auf dem Bild vertreten sein konnte, da er hart gearbeitet hat. Prioritäten wurden klar gesetzt . Einfach vorbildlich